 ภาพแสดงอุปกรณ์ที่ใช้ทดลอง ล่าสุด
ภาพแสดงอุปกรณ์ที่ใช้ทดลอง ล่าสุด เป็นผลที่แสดงความเร็ว และค่าsensor ของ ฟังก์ชัน fn1_1ทาง Hyper terminal
เป็นผลที่แสดงความเร็ว และค่าsensor ของ ฟังก์ชัน fn1_1ทาง Hyper terminal
เป็นผลที่ Test ค่าsensor ของ ฟังก์ชัน fn2_1ทาง Hyper terminal
ภาพแสดงอุปกรณ์ที่ใช้ทดลอง ล่าสุดเป็นผลที่แสดงความเร็ว และค่าsensor ของ ฟังก์ชัน fn1_1ทาง Hyper terminal
 เป็นการรับค่าจากปุ่มแล้วนำไปใช้การเลือกเมนู และการทำงานต่างๆ
เป็นการรับค่าจากปุ่มแล้วนำไปใช้การเลือกเมนู และการทำงานต่างๆ

เป็นฟังก์ชันการทำงานของ fn1_1 ฟังก์ชันนี้เป็นการรับค่าจากsensor ตัวที่1 และตัวที่ 2 มาคำนวณหาความเร็วซึ่งเมื่อคำนวณแล้วจะนำผลออก ทางport serial และ หน้าจอ LCD

เป็นฟังก์ชันtest การรับค่าจาก sensor ตัวที่หนึ่งและสอง และแสดงผลออกทาง port serial

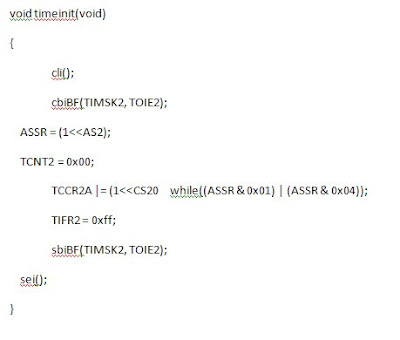
เป็นฟังก์ชันนับเวลาซึ่งจะเข้ามาทำงานในทุกครั้งที่เกิด overflow ของtimer2
โปรแกรมการทำงานทั้งหมดสามารถ download ได้จาก link ทางขวามือ >>>
การอินเตอร์รัพท์
- ในระบบที่มีอุปกรณ์ต่างๆหลายชนิดนั้นบางครั้งเราอาจจะสงสัยว่าในขณะที่นาฬิกาของเครื่องเดินไปได้ตลอดเวลาพร้อมๆกับที่เราใช้ง านอย่างอื่นโดยที่เวลาเดินไปอย่างไม่ผิดพลาด หรือว่าเครื่องได้อ่านแผ่นดิสก์อยู่ ในขณะเดียวกับที่เราพิมพ์ข้อมูลผ่านทางแป้นพิมพ์ได้ ซึ่งเสมือนว่าเครื่องสามารถทํางานได้หลายๆอย่างในเวลาเดียวกัน ซึ่งการที่จะทําได้เช่นนี้นั้น ซีพียูจำเป็นต้องมีวิธีการติดต่อกับอุปกรณ์ภายนอกต่างๆอย่าง มีประสิทธิภาพ
- ซึ่งก็คือให้ซีพียูใช้เวลาส่วนใหญ่ในการทำโปรแกรมหลัก และหันมาสนใจอุปกรณ์ภายนอกก็ต่อเมื่ออุปกรณ์ภายนอกส่งสัญญาณ ซีพียู จะหยุดจากการทำงานในโปรแกรมหลักและไปทำงานในโปรแกรมย่อยซึ่งอุปกรณ์นั้นๆร้องขอมา เมื่อเสร็จแล้ว ซีพียูก็จะกลับมาทำโปรแกรมเดิมที่ หยุดไปต่อ ไป ลักษณะเช่นนี้เรียกว่า การอินเตอร์รัพท์ (Interrupt)
การอินเตอร์รัพท์สามารถแบ่งได้เป็น 2 ประเภทใหญ่ๆดังนี้คือ
1.Non-maskable Interrupt (NMI) คือ การอินเตอร์รัพท์ที่ซีพียูไม่สามารถปฏิเสธได้ หากมีการอินเตอร์รัพท์ประเภทนี้มา ซีพียูต้องหยุดการทำงานของโปรแกรมที่ทำอยู่ในขณะนั้นโดยไ ม่มีข้อแม้ และเปลี่ยนไปทำงานให้การอุปกรณ์ที่มีการส่งอินเตอร์รัพท์เข้ามา
2.Maskable Interrupt (INT) คือ การอินเตอร์รัพท์ที่ซีพียูสามารถปฏิเสธได้ โดยปรกติ ซีพียูจะมีการกำหนดว่าในขณะนั้น ซีพียูจะอยู่ในภาวะ Disable Interrupt (DI) หรือ Enable (EI) ถ้าหากว่า ในขณะที่มีการอินเตอร์รัพท์เข้ามานั้น ซีพียูอยู่ในภาวะ Disable Interrupt แล้ว การอินเตอร์รัพท์นั้นก็จ ะได้รับการปฏิเสธไป แต่ถ้าเป็น Enable Interrupt การอินเตอร์รัพท์นั้นก็จะได้รับการสนองตอบ



